Projekt StratoPi V2 – Videoaufnahmen in der Stratosphäre
Auf der Seite StratoPi habe ich unsere erste Umsetzung für den Stratosphärenflug beschrieben.
Da das Projekt erfolgreich verlief und wir nun wissen, an welchen Schrauben wir noch drehen müssen und was verfeinert werden kann/muss, stelle ich nun die zweite Version unserer Sonde vor.
Diesmal wird tatsächlich eine Höhe von 35-40 km avisiert. Dies erreichen wir mit einem größeren Ballon
mit mehr Tragkraft aber einer leichten Sonde. Es werden mehr Kameras zum Einsatz kommen und die Technik
wird auch um einige Sensoren erweitert.
Den Stand unserer Entwicklung werde ich hier in Form eines „Tagebuches“ dokumentieren.
22.10.2015 Erste Modifikation
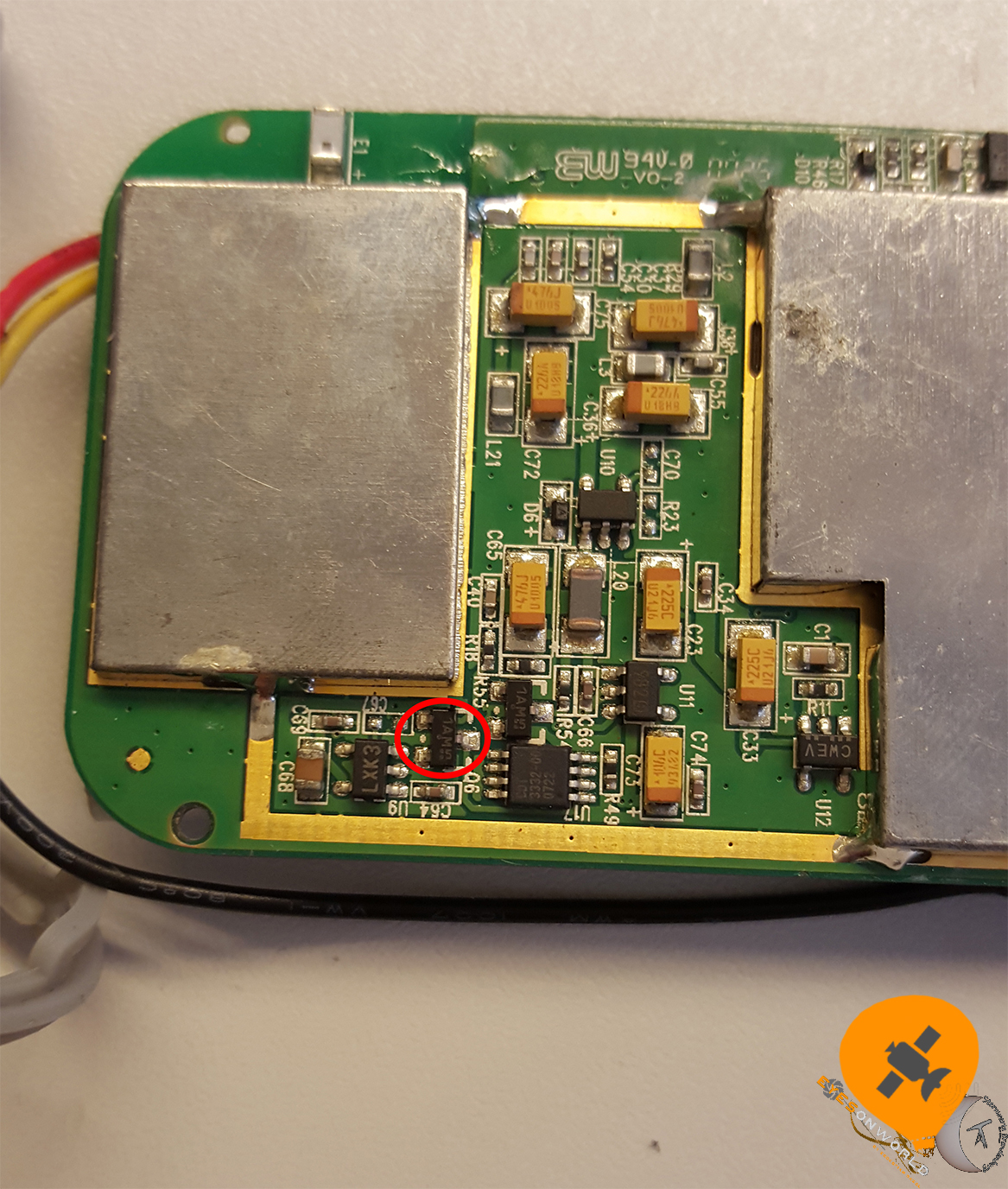
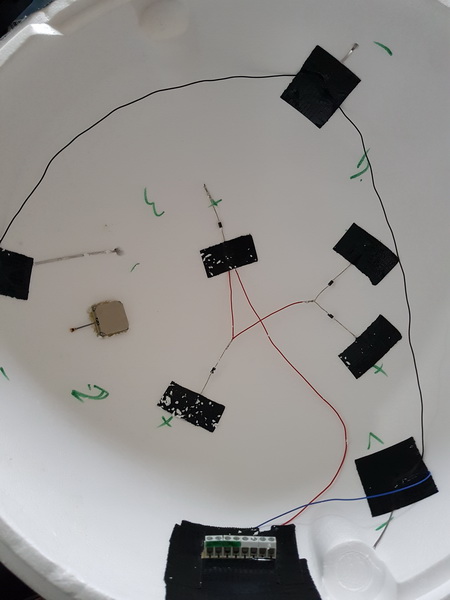
Bei unserer ersten Sonde erfolgte die Verbindung zwischen dem Raspberry Pi und dem GPS-Empfänger per Bluetooth. Die erfordete ein Script zur Überwachung. Falls Verbindungsabrüche auftreten sollten, wurde die Verbindung erneut hergestellt. Wie die Auswertung ergab, kam es zu keinen Abbrüchen und es müsste nichts geändert werden. Da der USB-Bluetooth-Dongle aber Strom verbraucht und es eine theorethische Ausfallsituation geben kann, entschied ich mich den GPS-Empfänger umzubauen. Normalerweise ist der GPS-Empfänger nur per Bluetooth zu koppeln und sendet auch nur seine Daten darüber. Unter dem Akku des Empfängers befinden sich aber die Test-Pins für das Senden (TX) und Empfangen (RX) von seriellen Daten. Genau dort wurden zwei Kabel angelötet und bieten nun über einen USB-TTL-Konverter (logische Schaltung über USB ansprechen) die Möglichkeit ausgelesen zu werden (siehe Bild 1).
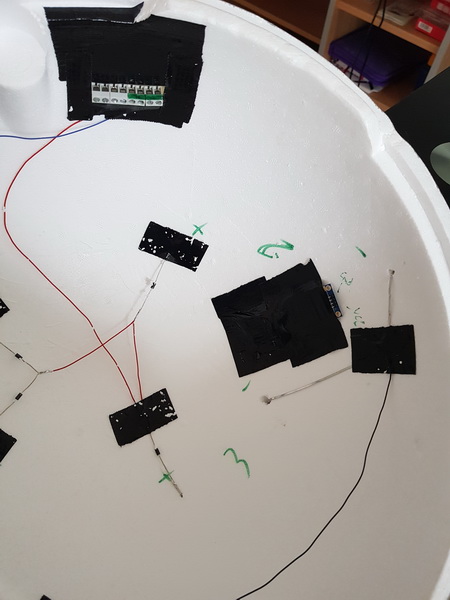
Da der GPS-Empfänger nach einer bestimmten Zeit ohne eine aktive Bluetoothverbindung abschaltet, musste noch ein Transistor ausgelötet werden (siehe Bild 2). Nun schaltet er zwar nach 10 Minuten das Bluetooth ab, der Empfänger bleibt aber angeschalten.
Ergebnis: Aus einem Bluetooth GPS-Empfänger wurde nun ein Bluetooth/USB Gps-Empfänger. Dieser Schritt war auch notwendig, um die Nutzung eines APRS-Trackers (Automated Position Reporting System) zu ermöglichen.
Mit solch einem Tracker werden die seriellen GPS Daten umgewandelt/kodiert und per Funk an einen Empfänger geschickt. Mittels spezieller Software werden die Daten ausgewertet und auf einer Karte dargestellt.

23.10.2015 SMS-Script Anpassung
Bisher hat der Raspberry als Antwort auf eine eingehende SMS die Koordinaten zurück geschickt, ganz egal von wem die SMS kam. Nun hat zwar niemand die Nummer von der Sonde aber ein bisschen Sicherheit schadet nie 😉
Jetzt muss die SMS zur Anfrage der Koodinaten aus zwei Dingen bestehen: Einem Password und den Befehl. Also zum Beispiel Passwort Position. Bei richtigem Password werden dann die Befehle ausgeführt, die unter
dem Begriff „Position“ laufen. Das bringt für die weitere Kontrolle des Systems ein paar Vorteile. Ich kann jetzt per SMS verschiedenste Kommandos ausführen und das SMS im Zweifelsfall auch per SMS neustarten.
Sollte also das „SMS-Senden-Script“ sich verabschiedet haben aber der Empfang von SMS funktioniert noch, dann kann ich per Befehl das System oder eben nur dieses eine Programm neustarten.
13.04.2017 Das Projekt geht weiter
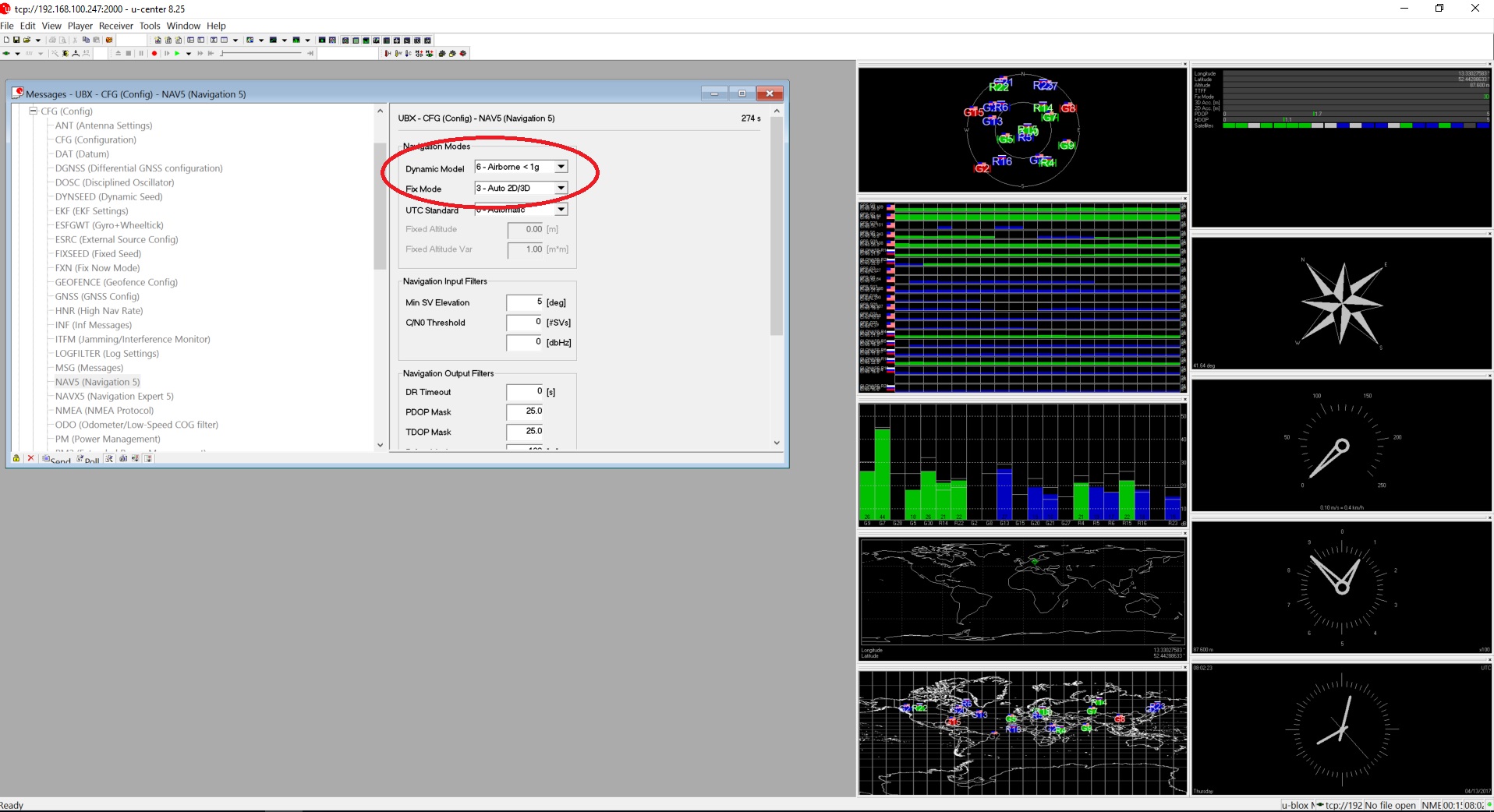
Der Raspberry hat einen neuen GPS-Empfänger spendiert bekommen. Der alte war ein Consumer-Produkt und somit wenig konfigurierbar. Wahrscheinlich flog der alte Ballon auch etwas höher als 18km,
GPS-Empfänger schalten aber bei 18 km ab. Der neue ist ein ublox Neo-M8n. Diesen habe ich jetzt für die Aufzeichnung bis 50km eingestellt (Airborne <1g).
In diesem Modus darf sich der Ballon nicht schneller als 100m/s (vertikal und horizontal) bewegen. Das sollte wohl nicht passieren 😉
Es wird die Version 2 der Raspberry-Kamera verwendet, um qualitativ bessere Bilder zu erhalten. Diese werden automatisch mit Koordinaten,Höhe und Temperatur beschriftet.
Ein Arduino wird während des gesamten Fluges zusätzlich Temperatur,Druck und Beschleunigung aufzeichnen.
22.04.2017 Bau der Sonde
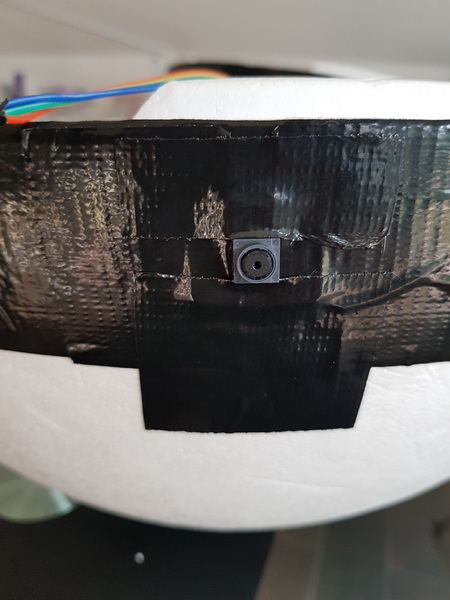
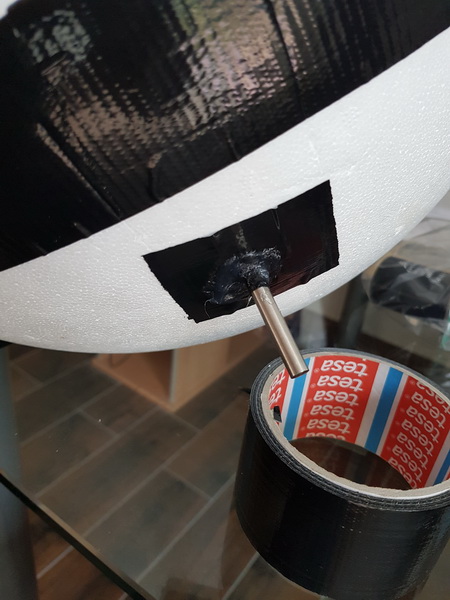
Die Sonde ist wie geplant eine Kugel geworden (liebevoll „Todesstern“ genannt).
Wir haben, wie schon bei der ersten Sonde, wieder Solarpanel genutzt, um eine Heizung für die Objektive zu realisieren. Beheizt werden diese, damit sie nicht beschlagen und
die Fotos/Videos unbrauchbar werden. Hinzu kommt noch der Ardunio für die Beschleunigungs – und Druckmessung. Ausserdem kommt noch eine Actioncam zur anderen Seite
gerichtet hinzu und eine Actioncam, die nach unten zeigt.
Die Kamaraqualität der Raspberry Pi Cam hat sich gegenüber dem Vorgänger schon um einiges verbessert. Diese wird Fotos schiessen, auf denen die Höhe und Temperatur abgespeichert wird.



21.05.2017 Der Start und Ergebnisse
Perfektes Wetter und sehr gute Wind – und Sichtverhältnisse.
Der Start des Ballons erfolgte um 10:11 Uhr auf einem Feld in Klein Steimke (Niedersachsen). Leider haben wir etwas zu wenig
Helium eingefüllt. Statt der geplanten 4-5 m/s Aufstiegsgeschwindigkeit erreichten wir nur ca. 2 m/s. Theoretisch hätte der Ballon so höher und länger fliegen sollen..theoretisch.
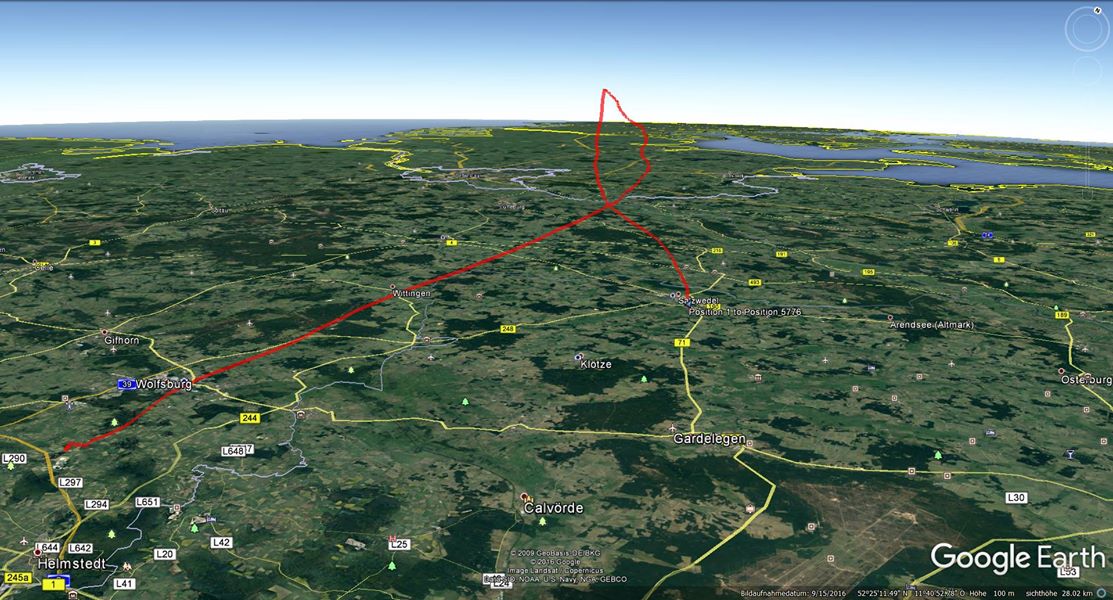
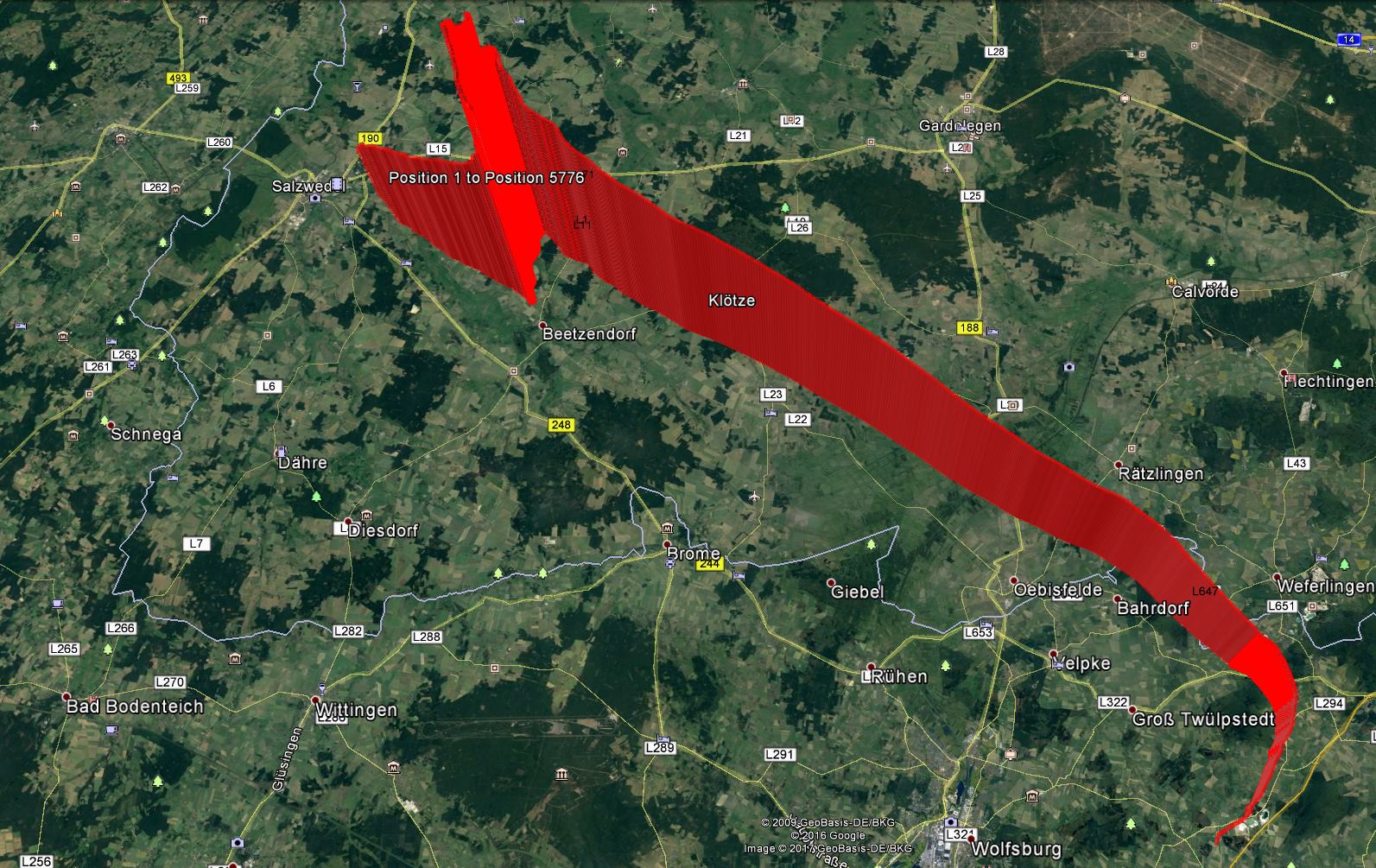
Nach eine Flugzeit von 3,5 h und einer zurückgelegten Strecke von 103 Km landete die Sonde etwas unsanft aber unversehrt auf
einem Feld in der Nähe unseres vorrausberechneten Landeorts.
Die Auswertung ergab, dass er bei einer Höhe von 23Km geplatzt ist. Immerhin haben wir so 5 Km mehr als beim letzten Versuch geschafft
und diesmal auch schönere Bilder und Videos gemacht.
Zurückgelegte Strecke :103 Km
Durchschnittliche Steigung: 30%, im Abwärtsflug bei -67%
Durchschnittliche Aufstiegsgeschwindigkeit: 1,8 m/s
Scheitelpunkt: 12:44:04 Uhr bei einer Höhe von 23.042,4 m
Kälteste Temperatur: -54,5 °C bei 11,2 Km Höhe